2023年一月至三月,沈阳建筑大学清源科技团队共成员八名,指导教师两名,所研发的仿生鱼水上垃圾收集器成功生产。
我国目前仍面临着严峻的水面垃圾污染情况。根据相关数据显示,每年中国面临的海洋垃圾处理量非常高。所面临的处理海洋垃圾压力是世界之最。清源科技团队结合自身科研方向和能力将仿生鱼水上垃圾收集器研发背景定位于适用清洁湖泊等小型水域垃圾的清洁机器人。
据该团队研究表明仿生鱼水上垃圾收集器相较于传统水上垃圾清洁器,具有体积小,成本低,清洁箱内置更换速度快,适用于所有水域的湖泊等优点。作品基于湖泊垃圾清洁的应用需求,是一款体积小于0.5m³、成本小于1000元的无人清洁器。有效解决现有产品体积太大成本过高 和更换垃圾储存箱时间长两个社会痛点问题。

图为仿生鱼水上垃圾收集器模型
为达到清洁器轻巧设计,该团队设计的仿生鱼清洁器可采用远程遥控形式操纵。通过红外遥控方式驾驶仿生鱼水上垃圾清洁器,进行水面作业和清理,规避了在水库上的作业风险,帮助水库管理者进一步降低运营成本,提高治理效率。该软件系统有如下六个功能:一、电源状况查询,通过点击即可查看剩余电量百分比。二、路径状况查询,通过点击即可查看路径规划图与路径完成百分比,预计剩余时间的信息。三、收集箱状态查询,通过点击即可查看收集箱是否装满是否需要返航等等一系列数据。四、一键脱离收集网,点击即可将收集网与防水外壳进行分离,以减少收集网导致重心偏移或勾到高速物体。五、一键返航功能,点击即可通过之前陀螺仪设计的数据记录,将记录 反推实现一键返航。六、紧急停浆功能,点击即可通过急停电机来实现停浆功能。
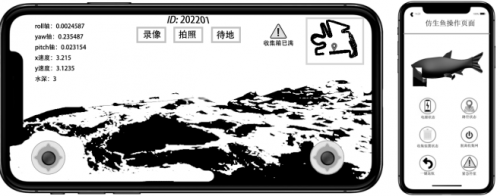
图为用户端效果图
仿生鱼垃圾收集器移动灵活,适用于小型水域的清洁工作,其特定的可更换弹性清洁网适用于多种情况的清洁工作。同时可以精准清理堤防、岸边垃圾,清理水面细小漂浮物,提高水面垃圾清洁效率,规避人工作业风险,实现水域垃圾细致清理,海洋垃圾的无人收集清理,帮助近海水域管理者节省人力打捞成本,从入海口减少垃圾流入海洋。希望在日后仿生鱼垃圾收集器可以为国家的水面垃圾污染问题作出贡献。

图为仿生鱼垃圾收集器电机驱动收集垃圾实物演示图